近幾年,從工業4.0的推廣,到2019年疫情造成的缺工問題,再到AI技術的全面啟動,機械手臂成為了頻繁討論的話題。儘管機械手臂在機械工業上的應用已經有六、七十年的歷史,但如今市面上的機械手臂仍然百家爭鳴,技術和應用領域持續擴展。
機械手臂的廣泛應用使其成為現代工業中不可或缺的設備之一。從汽車製造到電子產品組裝,機械手臂在提高生產效率、降低人力成本和提升產品品質方面的成效有目共睹。隨著技術的不斷進步,機械手臂的靈活性和智能化程度也在不斷提升。

台達自製手臂控制器:多樣運動學構型一次滿足
市場上現有的套裝機械手臂並不能完全滿足所有需求。一些企業需要高度客製化的解決方案,以應對特殊的空間和工藝上的需求。 因此,特殊自製機械手臂解決方案因應而生。
接下來要介紹除了標準套裝機械手臂之外,還有其他機械手臂控制器並內建多種特殊手臂架構的運動學,整合成一套自製手臂的控制器例如接下來會介紹的台達ASDA-MS手臂控制器內建四軸750W以下伺服馬達驅動器(最多還可擴充6軸),並內建多種特殊手臂架構的運動學,整合成一套自製手臂的控制器讓各位想 自 製手臂的業界先進,能夠快速地應用。
接下來有哪一些運動學的構型呢? 有最基本的二到五軸的卡式座標系、有二到五軸的Delta Robot(水平取放速度最快俗稱蜘蛛手)、有二到六軸的SCARA(有標準SCARA也有類似晶圓取出臂之構型)、二到五軸的Cylindrical構型、三到七軸的Articulated構型。
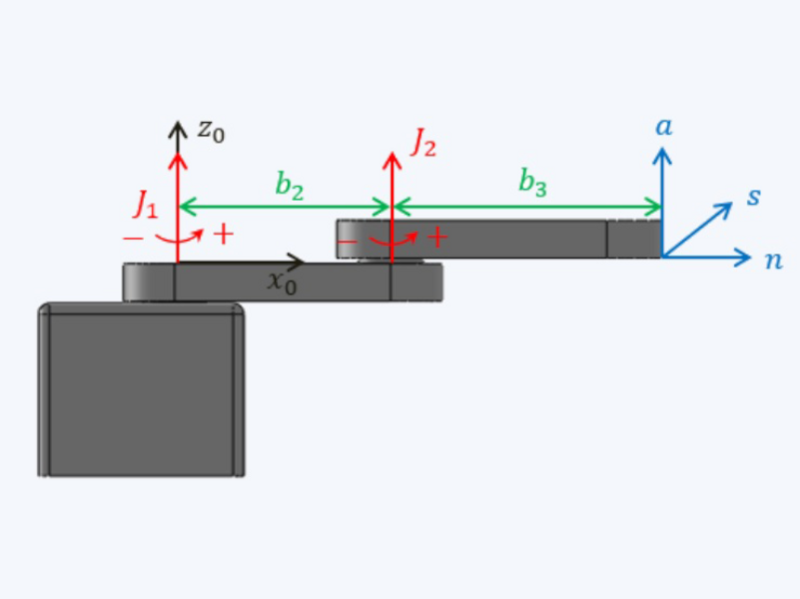
二到五軸的卡式座標系:
類似於直角坐標系,適合於傳統的搬運和定位操作。
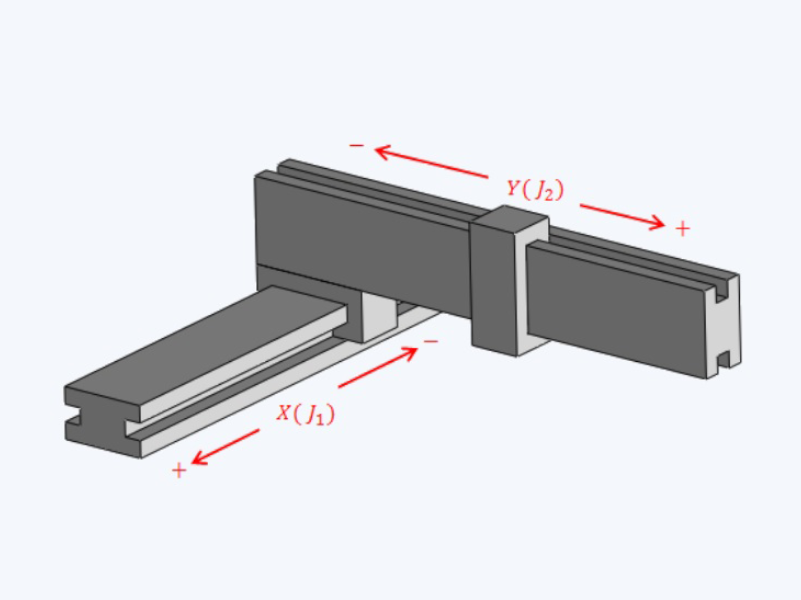
卡式二軸
卡式五軸
二到五軸的Delta Robot:
最快速的平面取放手臂,通常由三個平行的臂組成,能夠快速進行水平移動,常見於包裝和取放作業中, 俗稱蜘蛛手 。
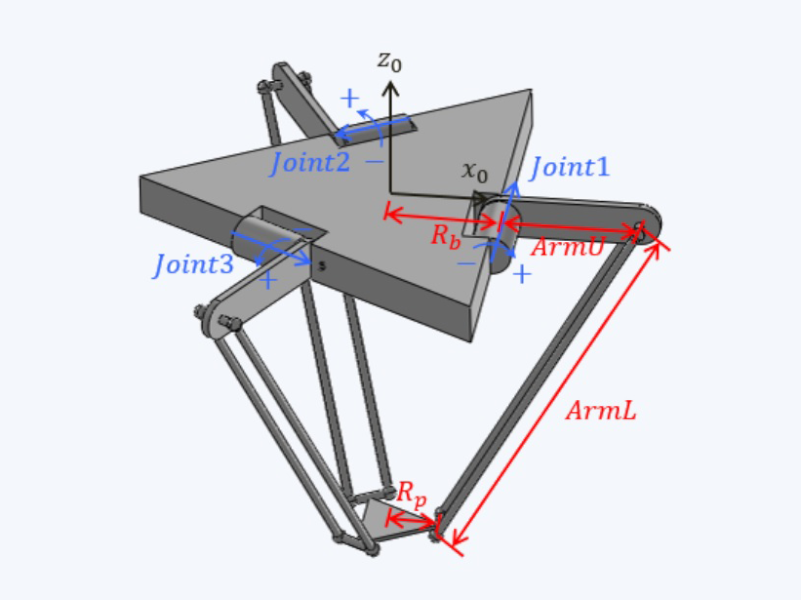
DeltaRotation三軸
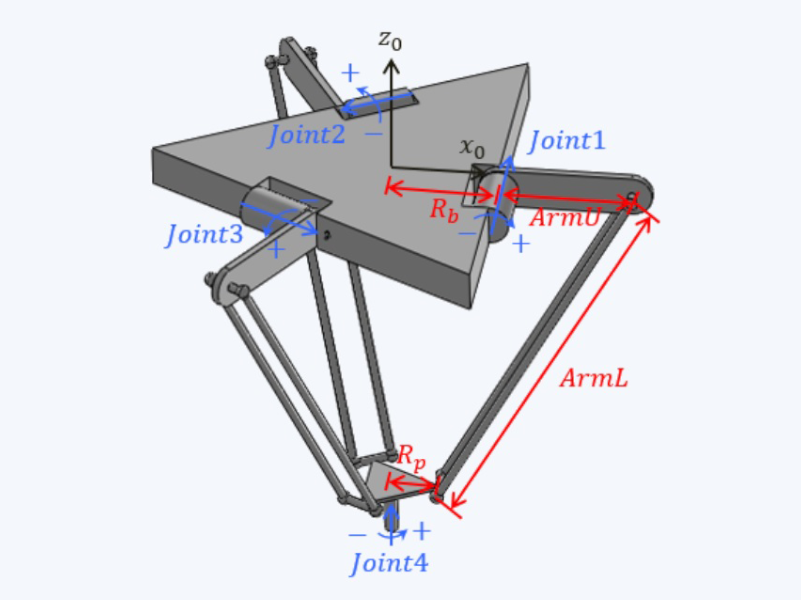
DeltaRotation四軸
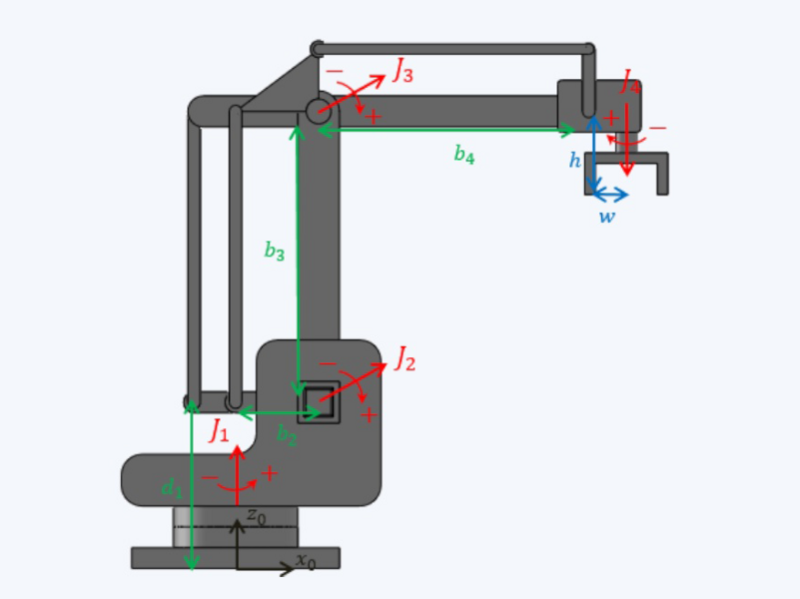
二到六軸的SCARA:
這種手臂最像產線作業員的徒手組裝姿態,適合空間有限的組裝和取放操作, 常見於電子和半導體產業。目前客戶應用最多的案例就是這個晶圓取出或卡夾取放相關應用。
SCARA二軸
SCARA三軸
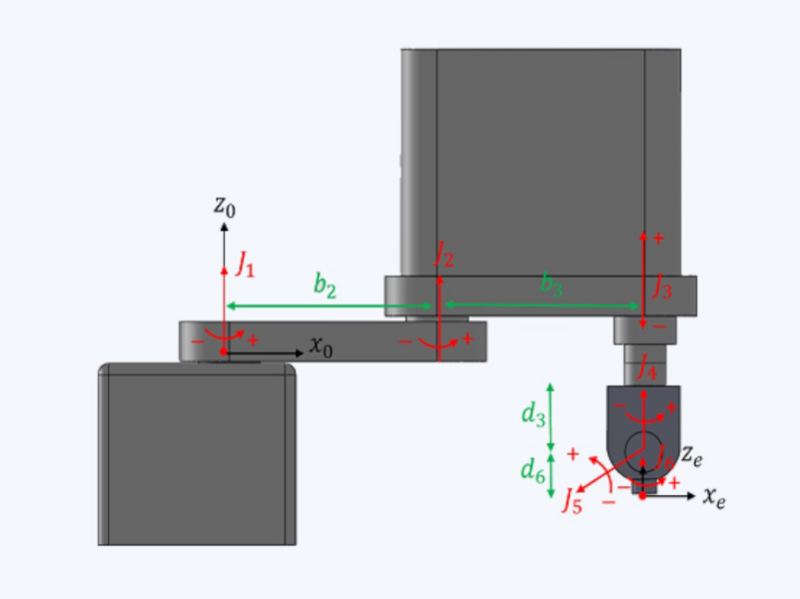
SCARA五軸
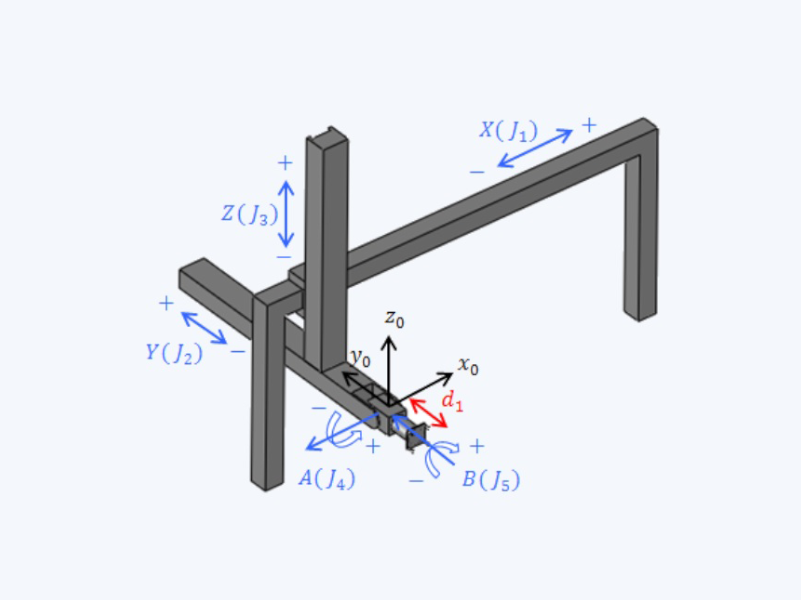
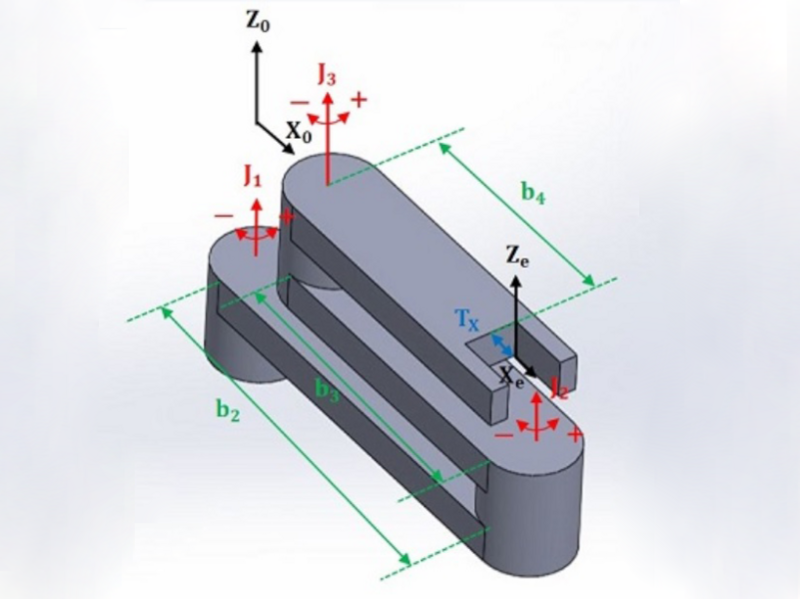
二到五軸的Cylindrical構型:
手臂在圓柱座標系中運行,提供了圓形和垂直方向的運動,適用於物件的堆放、翻面…等。
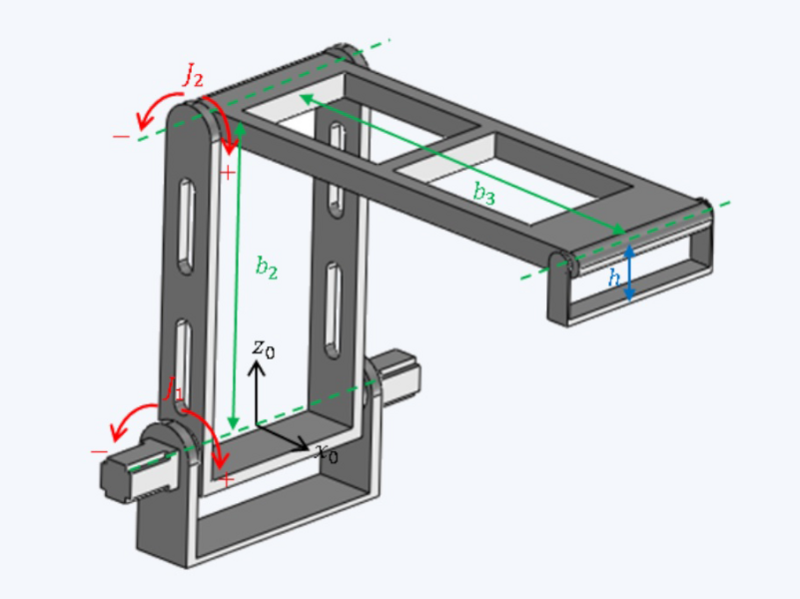
Cylindrical二軸
Cylindrical四軸
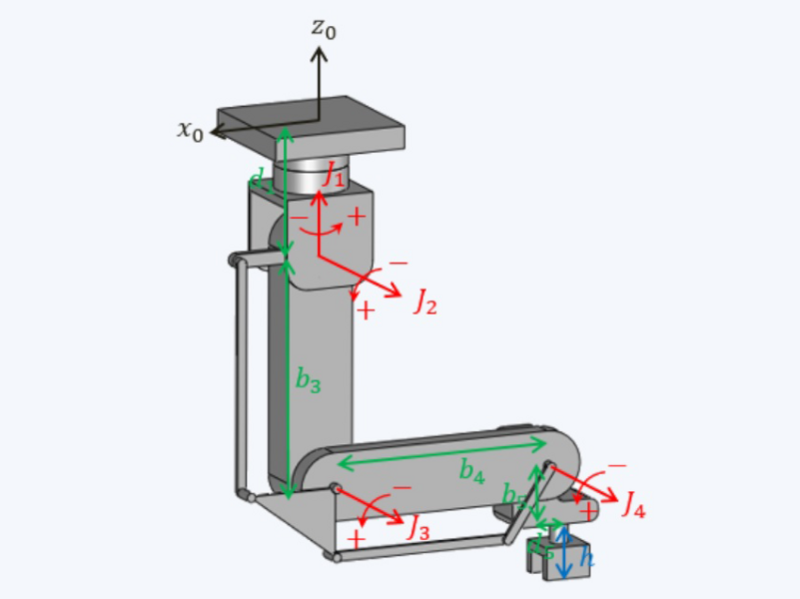
Cylindrical四軸
三到七軸的Articulated:
這種手臂類似人類手臂,具有多個旋轉關節,靈活性高。如果取放位置角度單純,可以選擇軸數較少的精簡配置。如果需要複雜位置角度的動作則有較多軸的配置,適用於多種工業應用。
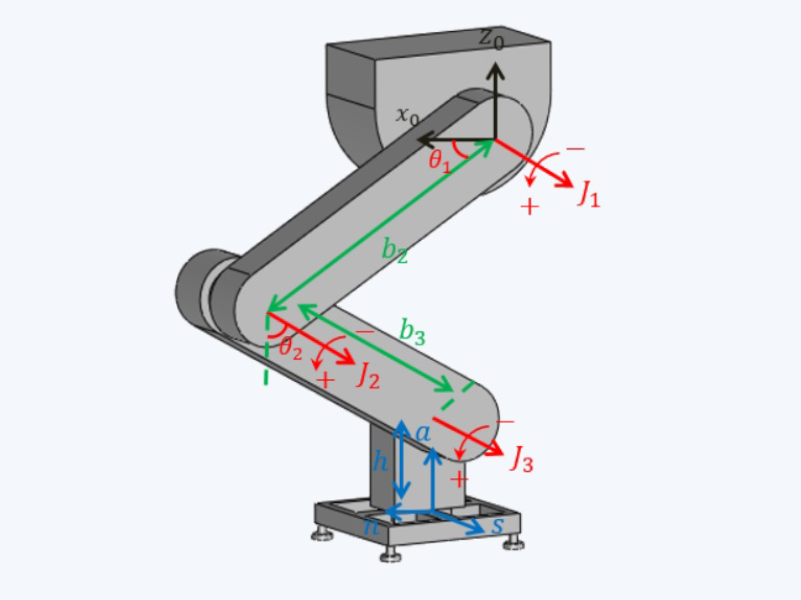
Articulated三軸
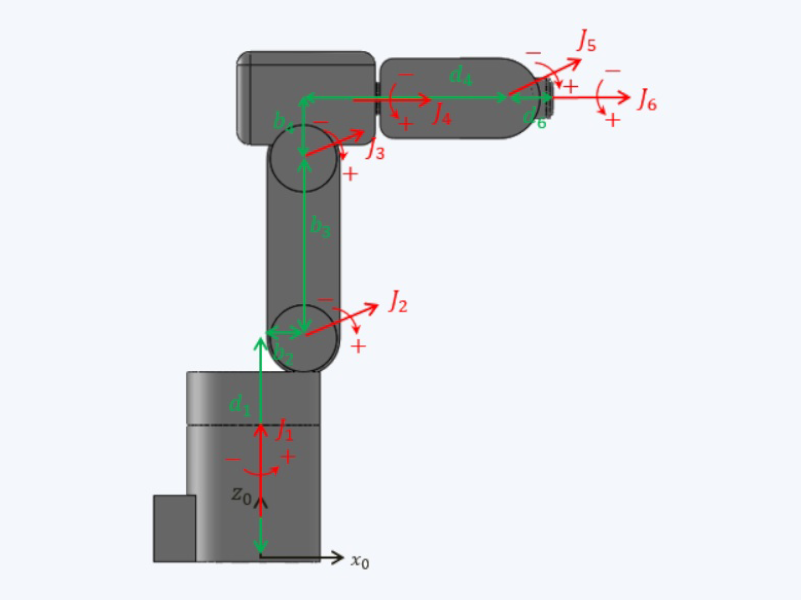
Articulated六軸
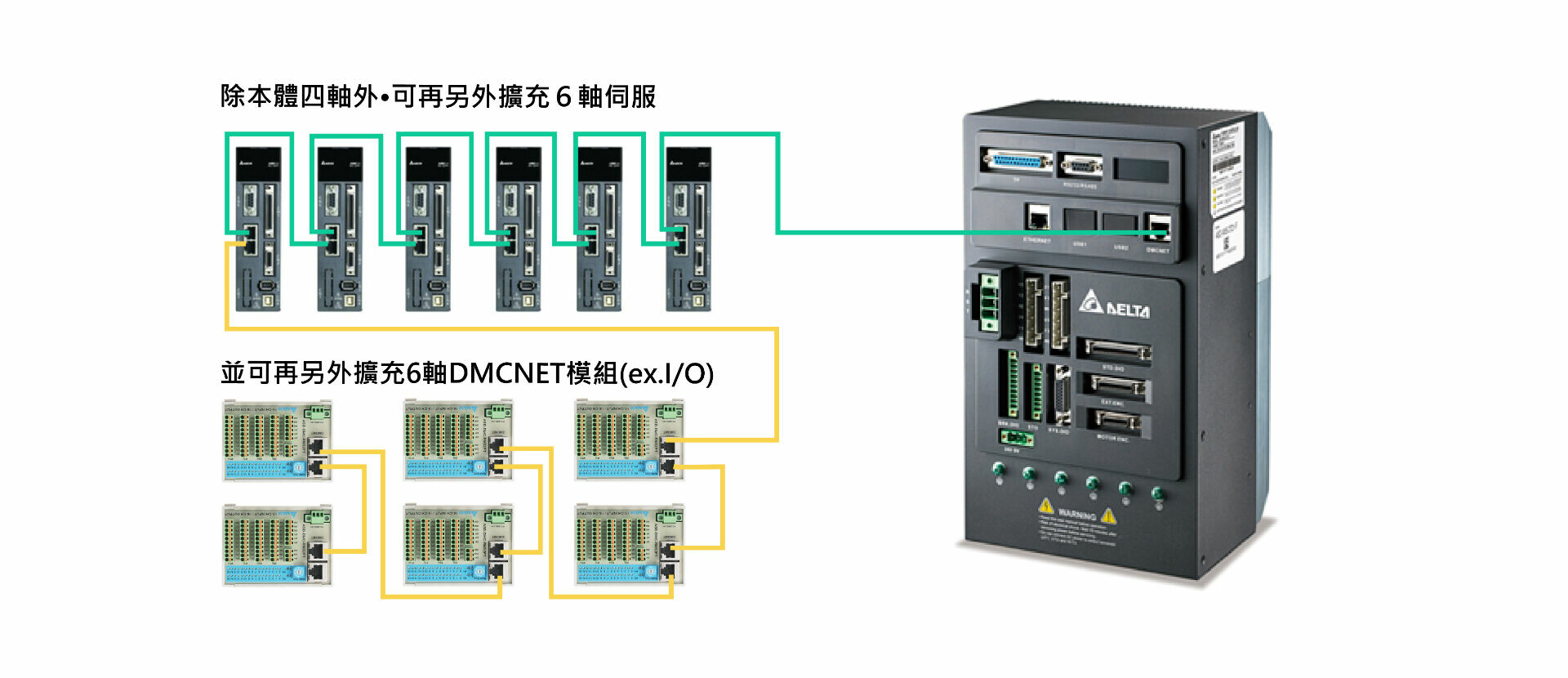
ASDA-MS控制器可擴充網路架構圖
這個控制器的配置除了本機四軸(可選配100W~750W)外,最高還可以擴充六軸(可選配100W~15KW),與六個IO模組。使用 台達ASDA-MS 手臂控制器最大的意義,就是能夠依據客戶設計的手臂長度、伺服減速機搭配的比例,自動轉換伺服圈數至空間座標,在妥善準確的周邊機構設計下,能實現最少量校點,即能透過偏移語法,達到準確移動至最多位置的便利性。
羅昇完整的產品線及專業評估應用
在現今快速變化的製造業環境中,選擇合適的機械手臂解決方案至關重要。隨著自動化技術的不斷革新,生產線上的每一個細節都可能影響到整體效能。透過羅昇企業專業的服務團隊,您可以獲得量身定制的機械手臂控制器和系統配置,確保在滿足生產需求的同時,最大化地提升生產效率和產品品質。無論是面對複雜的多軸運動學構型需求,還是針對特殊生產流程的定製化要求,我們的專家團隊都能根據您的實際情況,為您提供最優化的解決方案。
IT 與 OT 整合,邁向智慧製造