機械手臂被廣泛應用在各種行業,常見於製造和裝配,包含電子業、PCB 產業、半導體相關產業、面板光電業、生技醫療業、電池製造業、加工業、服務型機器人、製鞋業等不勝枚舉。在工業 4.0 的浪潮下,無人工廠、智能工廠等概念更是宣稱將全面取代傳統人力,轉而由機械手臂接手。故今天就由我們羅昇與大家一同探討機械手臂有哪些用途、類型、應用以及產線規劃過程吧!
機械手臂如何操作?
機械手臂又名機器手臂、機器人手臂,是一種自動控制設備。
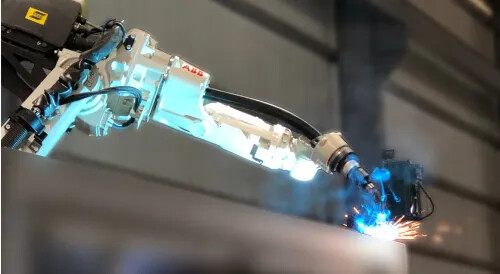
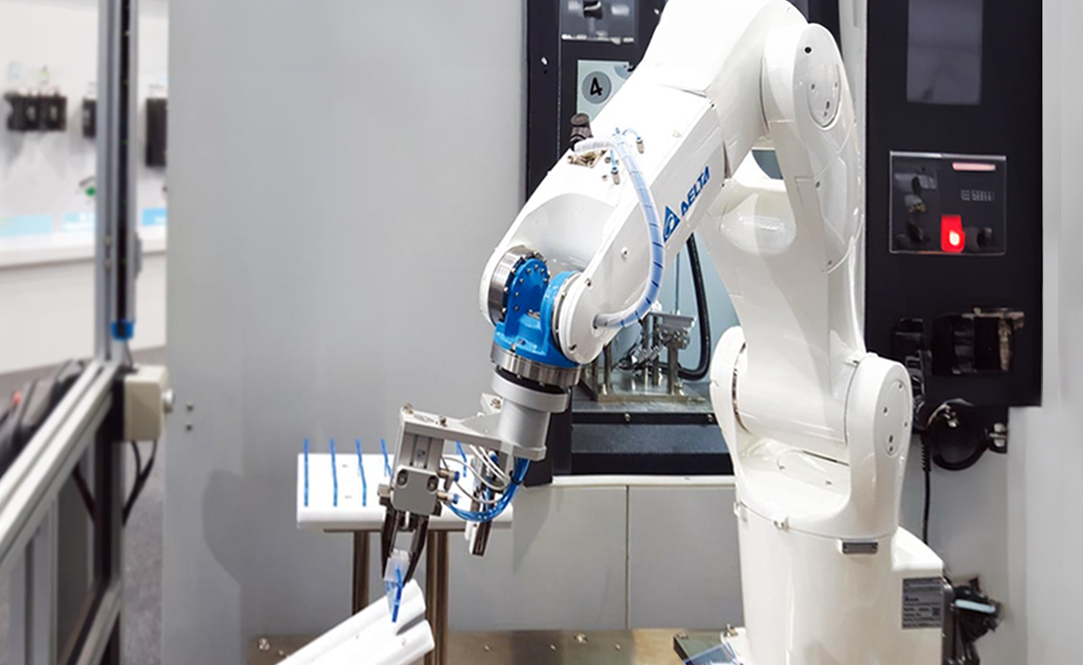
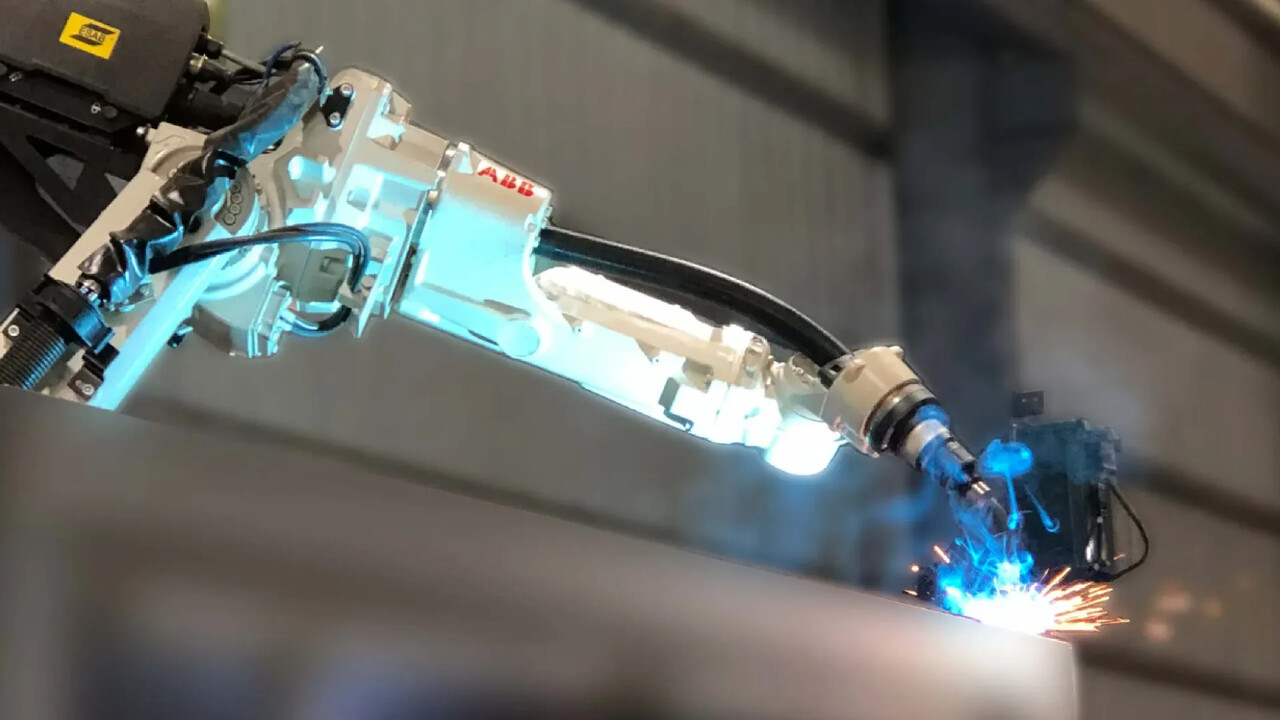
機械手臂自動化系統通常由手臂主體、手臂末端夾爪、控制器、伺服馬達、減速機和感測器等等元件組成。透過機械手臂程式控制,機械手臂能夠執行重複且高精度的動作,從而完成那些傳統機械設備難以實現的任務,例如大範圍、大角度的焊接或精密夾取操作。
機器手臂透過程式控制,能夠執行各種精細動作,這些動作可以轉換為指定的平面或3D運動。在執行過程中,它會持續提供反饋訊息並進行即時調整,以實現極高精準度的操作。
常見的機械手臂的驅動方式:
每種驅動方式都有其優點和限制,選擇適當的方式取決於特定應用的需求,包括運動範圍、速度、精度、荷重、剛性能力和成本等因素。
驅動類型 | 特色 |
|---|---|
電動驅動 | 這是最常見的方式,使用電動馬達來驅動機械手臂的運動。 電動馬達可以是伺服馬達或直流馬達,具體選擇取決於需要的運動精度和速度。 |
液壓驅動 | 在某些應用中,特別是需要 高承載能力 和 高功率輸出 的情況下,使用液壓系統來驅動機械手臂,例如碼跺型搬運機器人。 |
氣動驅動 | 氣壓驅動通常是在 輕型應用 中,例如裝配作業或輕型材料處理。 |
混合驅動 | 結合多種驅動方式,以便在不同情況下達到最佳性能。例如:一個機械手臂可使用電動驅動進行精確的定位,並同時使用液壓驅動進行高承載能力的操作。 |
探索不同種類的機械手臂:選擇最適合您需求的型號
機械手臂種類:四軸、六軸、協作型、碼垛型 …?該如何選擇?
四軸機械手臂 SCARA (水平式關節機器人)
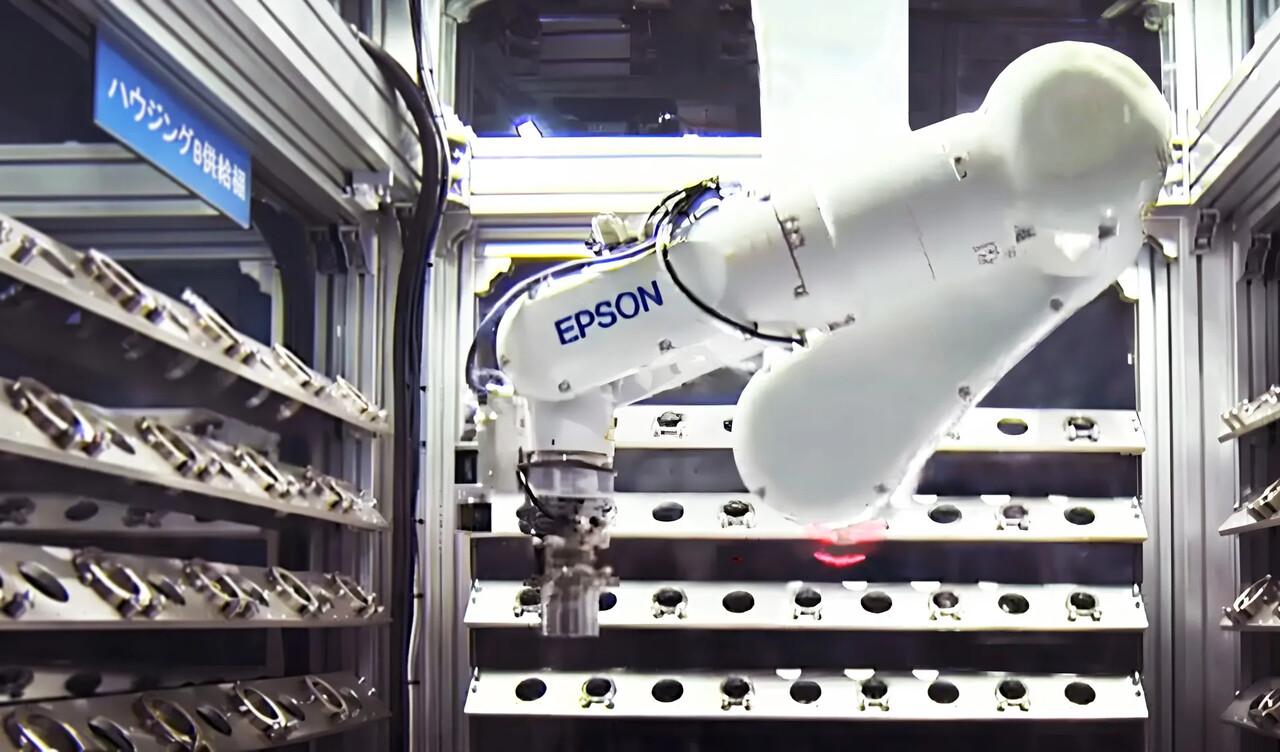
六軸機械手臂 Six Axis Robotic Arm
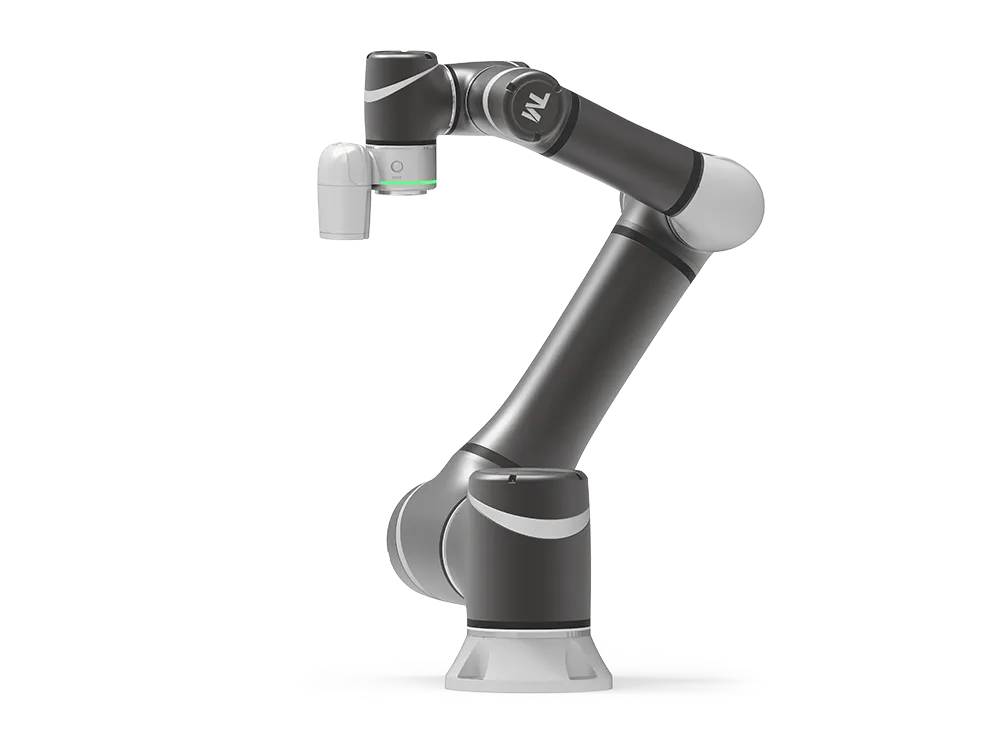
七軸機械手臂 Seven Axis Robotic Arm


碼垛(堆棧)型 機械手臂 Palletizing Robot
堆棧物流行業中需求量最大的應用之一。在物品出貨前的最後一個階段,也就是堆疊紙箱、袋狀包裝或瓶罐包裝時,效率是極為重要的;搭配碼跺機械手臂的方案,自動化堆棧系統都能大大提升生產力與效率。
機械手臂模擬軟體是什麼?
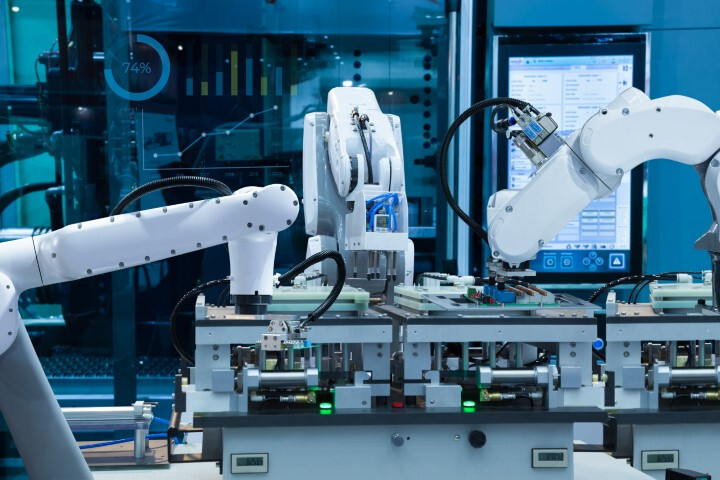
透過模擬軟體,可預先讓設備在初期評估還未進入實體階段時,先行驗證產品組裝方式、生產效能以及整體作業環境 layout 空間。 工業 4.0 工廠以機械手臂和智慧感測系統為核心,實現機械部件之間的即時溝通和環境監控,利用大數據和物聯網技術,結合雲端和高效能運算,打造智慧工廠。同時,整合 IT 和 OT 系統,收集和分析機械數據,協助決策者進行智能化決策,是製造業實現工業 4.0 的重要一步。
羅昇完整的產品線及專業評估應用
在確定選用一款特定的型號之前,必須花一定的時間確保需求明確是非常重要的。如果您選錯了型號,它們的性價比優勢就會有所降低,甚至於有可能會超規不當使用,進而減短機械手臂壽命。
透過羅昇工程師的專業諮詢,透過討論與專案瞭解方式協助您選擇正確型號,並經由模擬軟體協助您估算荷重、工作範圍、生產效率、慣性與離心率。【點擊連結,即刻諮詢】
IT 與 OT 整合,邁向智慧製造